
Как правило, взаимодействие ученых с насекомыми и микроорганизмами ограничиваются визуальным наблюдением — в основном, с помощью микроскопа. Потрогать крошечное существо пальцем пока не представляется возможным по ряду очевидных причин.
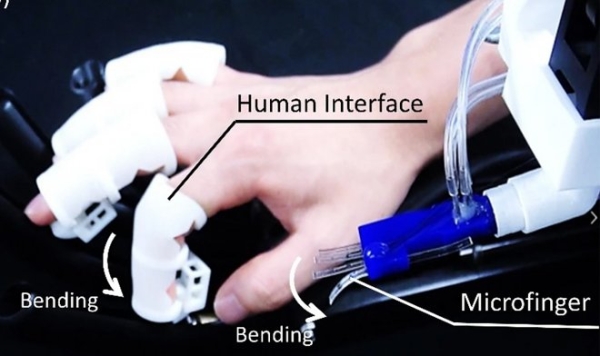
Однако эту проблему решили инженеры из японского Университета Рицумейкан под руководством профессора Сатоши Кониши, разработавшие мягкий роботизированный микропалец, с помощью которого сумели потрогать жука-таблеточника (lasioderma serricorne) размером около 5 мм, не опасаясь причинить ему вред.
Как пояснил Кониши, сверхосторожные прикосновения обеспечивает жидкометаллический гибкий тензодатчик, а пневматический баллонный привод работает подобно искусственной мышце, позволяя управлять датчиком и перемещать его, как палец. Созданная на его основе роботизированная перчатка позволяет управлять целым набором микропальцев.
В ходе эксперимента подопытного жука-таблеточника зафиксировали с помощью всасывающего устройства, при этом микропалец использовался для прикосновения и измерения силы реакции конечностей насекомого, которая составила 10 миллиньютонов.
В дальнейшем, по мнению разработчиков, такую роботизированную перчатку можно объединить с технологиями дополненной реальности для взаимодействия человека с окружающей средой на





