



















Исследователи из Итальянского технологического института разработали систему оценки параметров полета для робота гуманоидного типа, который умеет использовать реактивные двигатели. Эта задача в разы сложнее, чем создать реактивный ранец для человека – робот понятия не имеет, как балансировать свою конструкцию в полете. Но при этом должен функционировать не только в соседстве с очень горячей струей газа, но и двигаться на скоростях до 1800 км/ч, а потом еще и работать на местности.
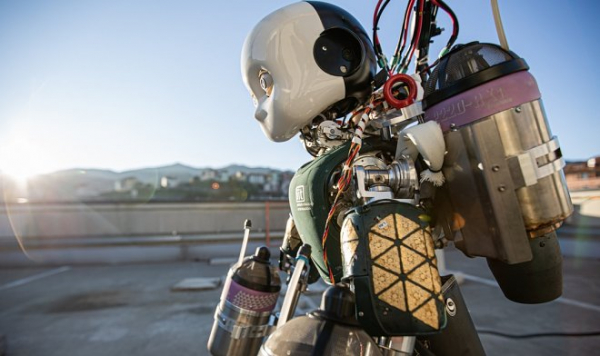
В основе проекта iRonCub лежит идея создать робота-спасателя, который сможет залететь в труднодоступное место и там погасить пожар, разобрать завалы, отыскать раненых. Для этого необходимо совместить тяжелую и прочную конструкцию наземной прямоходящей машины с возможностью полета. Винтовые двигатели тут не годятся, да и пропеллеры сильно увеличивают габариты робота, поэтому выход только один – реактивная тяга.
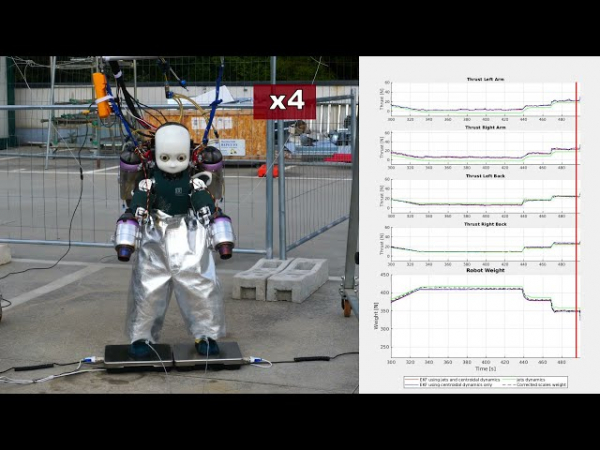
Однако полет с реактивными двигателями в разы сложнее, чем с пропеллерами – у машины нет возможности зависнуть и оценить ситуацию, реагировать нужно очень быстро, при этом крайне важна точность движений. Именно этим и занялись итальянские инженеры, которые спроектировали универсальную систему оценки ситуации в воздухе именно для роботов. Гуманоидный iRonCub просто демонстратор возможностей, а в дальнейшем на этой платформе можно будет учить летать роботов произвольных конструкций и размеров.
Пока что iRonCub не умеет ни летать, ни ходить, ни делать что-либо полезное. Всему этому ему еще только предстоит научиться, а для этого нужен полноценный ИИ. Трюки в стиле творений Boston Dynamics здесь неуместны, нового робота готовят для реальной работы в полевых условиях, а это куда сложнее, чем кажется.